1997 - 2017 : 20 ANS DU S-AWC MITSUBISHI
La caution du WRC
Le système Super-All Wheel Control (S-AWC) occupe une place à part parmi les technologies emblématiques de Mitsubishi Motors puisqu’il est directement le fruit de l’évolution des réglementations du sport automobile. Arme ultime de la technologie 4x4 de la marque, avec notamment la première Galant VR4 et la légendaire Lancer Evolution...
Texte : Sébastien DUPUIS - Photos : D.R.
Depuis sa première incursion dans la course automobile en 1962 (avec la petite 500 au Grand Prix de Macao), suivie de sa participation à diverses compétitions automobiles - depuis le rallye (avec la Colt 1000F au Southern Cross Rally en Australie ou avec la Lancer 1600 GSR au East African Safari au Kenya) jusqu’aux courses de monoplaces (avec la double victoire de la Colt F2000 au Grand-Prix du Japon 1971) – Mitsubishi est depuis longtemps un nom reconnu de la course automobile avec de nombreuses récompenses, dont les 12 victoires de son légendaire Pajero dans le rallye Dakar. Fort de ses exploits en compétition, Mitsubishi Motors décide alors de renouer avec le rallye haut niveau, à savoir le Championnat du Monde des Rallyes FIA (WRC), mais avec une approche très différente de ce sport tout en se conformant aux dernières réglementations en vigueur…
Du groupe B au groupe A

Pour son retour en WRC, Mitsubishi Motors ne partait pas d’une feuille blanche puisqu’il avait déjà couru en Groupe B avec une version 4x4 du puissant coupé Starion Turbo, avant que les normes régissant le WRC ne changent quasiment du jour au lendemain suite à une série d'accidents tragiques. Aussi, dès le début de la saison 1987, les équipes usine ont commencé à développer des voitures destinées au Groupe A nouvelle formule. Mitsubishi Motors s’est alors fixé comme objectif une version WRC de la toute nouvelle Galant de 6ème génération – élue Voiture de l’Année 1987 au Japon.
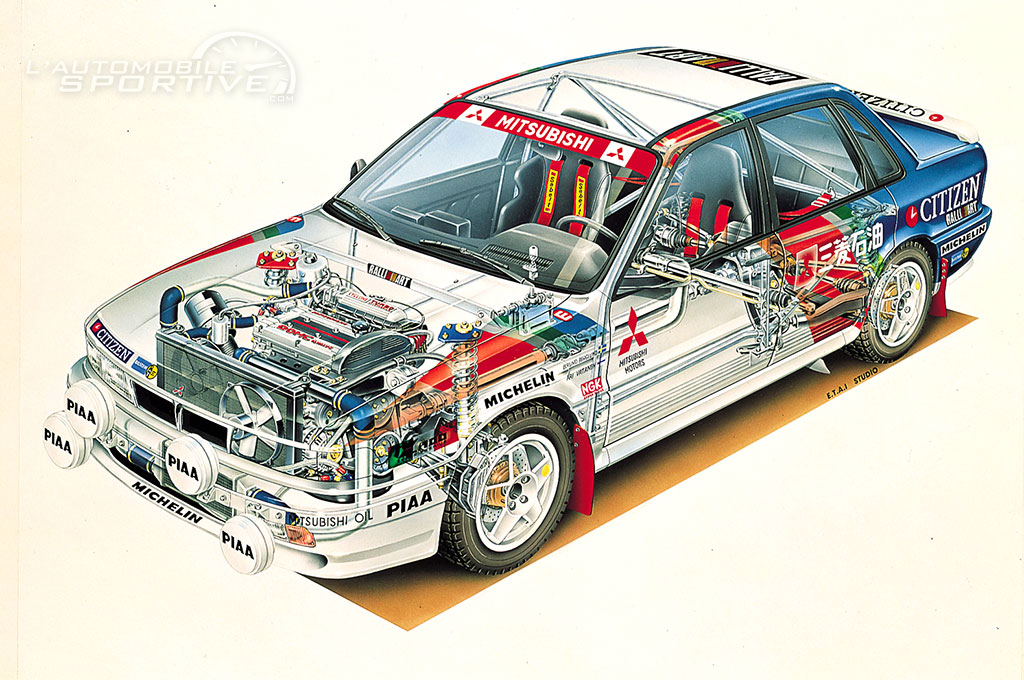
En prenant comme base la Galant VR4 à transmission intégrale, équipée d'un moteur 2,0 l suralimenté de 240 ch (sans toutefois les quatre roues directrices du modèle de série « Dynamic Four »), Mitsubishi Motors a développé une version de compétition, conçue et homologuée dès le départ pour être conforme avec le règlement du Groupe A. C’est au volant de cette voiture que les pilotes de Mitsubishi Ralliart Europe ont disputé pour la première fois une saison complète du championnat WRC en 1989 et ont ensuite décroché trois victoires : cette année-là le Suédois Mikael Ericsson est arrivé en tête de la 39ème édition du rallye des 1000 Lacs en Finlande, mais le plus grand succès de cette voiture est intervenu trois mois plus tard - en novembre 1989 - lorsque le Finlandais Pentti Airikkala a littéralement écrasé ses adversaires en remportant le 38ème rallye de Grande-Bretagne. Une troisième victoire a été remportée en 1991 lorsque Kenneth Eriksson a gagné le 40ème rallye international de Suède. Au cours de cette période, la Galant VR4 de Mitsubishi a également connu le succès dans un environnement très différent, celui de l’éprouvant rallye de Côte d’Ivoire - Bandama en 1990, 1991 et 1992.
De la Galant VR4 à la Lancer Evolution

Le Groupe A se développait rapidement à cette époque et les constructeurs concurrents cherchaient de nouvelles solutions pour améliorer les performances et le comportement de leurs voitures en utilisant de plus petites voitures avec un empattement plus court : c’est la raison de l’arrivée de la Mitsubishi Lancer Evolution - véritable légende du Groupe A, fruit du développement technique réalisé pour la Galant VR4. Comme pour les précédentes Lancer de course, Mitsubishi Motors est parti de la berline de série de la Lancer pour développer la première Lancer Evolution - 2 500 exemplaires homologués pour le Groupe A – dans le but de devenir plus compétitif en Championnat du Monde des Rallyes FIA (WRC). Et ce fut précisément le cas puisqu’il a décroché quatre titres Pilotes (en 1996, 1997, 1998 et 1999) et un titre Constructeurs (en 1998).
Inauguré sur la Galant VR4 lancée en 1987, le système a connu sa première grosse évolution avec l’arrivée de l'AYC (contrôle actif du lacet) en 1996 sur la Galant VR4 et la Lancer Evolution, cette dernière ayant encore ajouté le différentiel central actif (ACD) en 2001 (Evo VII). Une nouvelel fois optimisé pour la dernière génération de la Lancer Evolution (Evo X, lancée en 2008 en Europe), le système S-AWC est devenu un système de contrôle dynamique du véhicule, qui comprend et gère intégralement quatre systèmes différents :
- Différentiel central actif (ACD)
- Contrôle actif du lacet (AYC)
- Contrôle actif de stabilité (ASC)
- ABS Sport
Le système S-AWC garantit ainsi un contrôle unifié de ces systèmes, améliorant le comportement en virage, la motricité et la stabilité du véhicule, non seulement à l'accélération mais également en courbe, lors des freinages en virage et dans toutes les autres conditions de conduite.
Du WRC à la voiture de demain

Le système hybride rechargeable de Mitsubishi Motors utilise un nouveau système de transmission intégrale à deux moteurs électriques piloté électroniquement, couplé au système S-AWC (« Super-All Wheel Control ») de Mitsubishi. Dérivé de la transmission intégrale développée pour la Lancer Evolution, le système S-AWC de l'Outlander PHEV propose un contrôle intégré des quatre roues motrices, de l’ASC, de l’ABS et de l'AYC. De plus, fonctionnant de pair avec le système PHEV, le système S-AWC répartit la puissance entre les roues avant et arrière, ainsi qu'entre les roues gauches et droites, afin d'améliorer la stabilité de conduite et la précision de la tenue de route. En effet, le système S-AWC réduit la force de limitation du différentiel et le patinage des roues avant, tout en optimisant la répartition de la puissance entre l'avant et l'arrière afin de garantir une puissante accélération au démarrage. En outre, une fonction « 4WD LOCK » optimise la réactivité via une répartition de la force motrice entre l'avant et l'arrière favorisant la motricité et la stabilité en ligne droite sur les routes enneigées, boueuses et autres surfaces glissantes.
CONCLUSION
En résumé, le système « Super-All Wheel Control » (ou « S-AWC ») peut être appréhendé comme une technologie globale recouvrant différentes interprétations du même principe : quel que soit le véhicule, il est toujours conçu pour gérer les forces motrice et de freinage de chacune des quatre roues, en régulant le couple entre l’avant et l’arrière ainsi qu’entre la gauche et la droite. La saga « Super-All Wheel Control » de Mitsubishi Motors est donc appelée à se poursuivre dans le futur, en prenant une toute nouvelle direction, celle de l’électrique, comme démontré avec le Concept e-Evolution avec sa transmission intégrale à trois moteurs électriques et son contrôle actif du lacet à deux moteurs électriques. De là à espérer le retour de la Lancer Evo sous une forme beaucoup plus moderne…